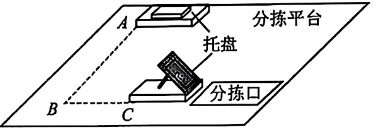
分拣机器人在智能系统的调度下, 能够自主规划路线, 确保高效、准确的分拣作业。某次分拣过程示意图如图所示, 机器人从 $A$ 点由静止出发先沿直线 $A B$ 运动到 $B$点, 此时机器人在 $B$ 点的速率为零, 再沿直线 $B C$ 运动到 $C$ 点停下, 再将货物从托盘卸到分拣口。已知机器人最大运行速率 $v_{ m }=3 m / s$, 机器人在加速或减速运动的过程中的加速度大小均为 $a=2.5 m / s ^2, A 、 B$ 间的距离 $x_1=6 m, B 、 C$ 间的距离 $x_2=2.5 m$ 。若机器人在最短时间内到达分拣口, 求:
(1) 机器人从 $A$ 点运动到 $B$ 点的过程中, 由静止加速到最大运行速率 $v_{ m }$ 时发生的位移以及所需的时间;
(2)机器人从 $A$ 点运动到 $B$ 点的时间;
(3) 机器人从 $B$ 点运动到 $C$ 点的平均速度大小。